Dr. Shin
AI Specialist
Shinichi Hosomi
Not just technology.
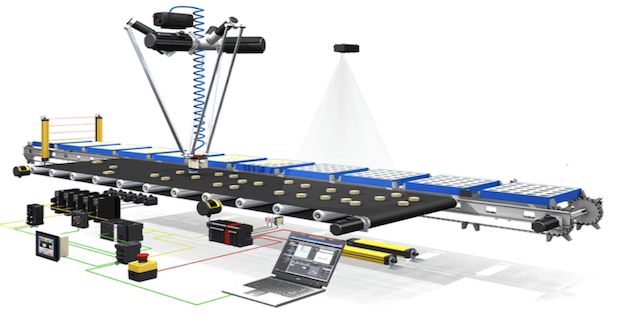
Over a decade of experience in traditional factory automation.
And a deep understanding of the processes and human effort behind even a single tomato.
This perspective brings truly valuable AI-driven automation.
Background
He has over 15 years of experience in the automation industry, developing products that enable valuable automation.
He learned automation theory in traditional factories and applied it to both autonomous robotics and IoT-based smart agriculture.
His contributions are grounded in solid engineering skills and a deep respect for collaboration.

Engineering Skills
His career began as an embedded software engineer, developing Programmable Logic Controllers, at a leading manufacturing company.
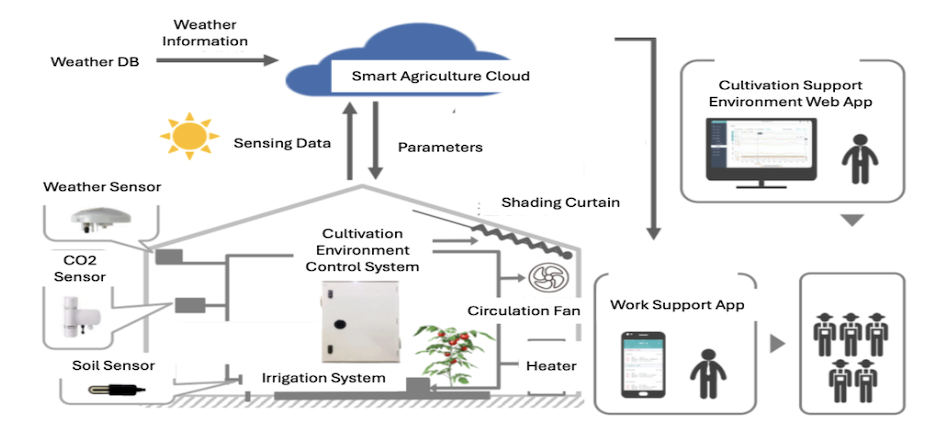
He later developed AI algorithms for autonomous robots and agricultural support systems.
He holds nine patents protecting the core algorithms of these products.
Core Collaboration Skills
He consistently strives to understand the challenges all workers face and to present clear goals that resonate with everyone involved.
His commitment was clearly demonstrated during the development of a smart agriculture system. When developing AI algorithms, he brought his computer to the farms, worked side by side with farmers, and discussed real challenges directly in the field.
As a result, he built mutual trust among experts, enabling the fusion of technology and domain expertise.



Key Success Factors
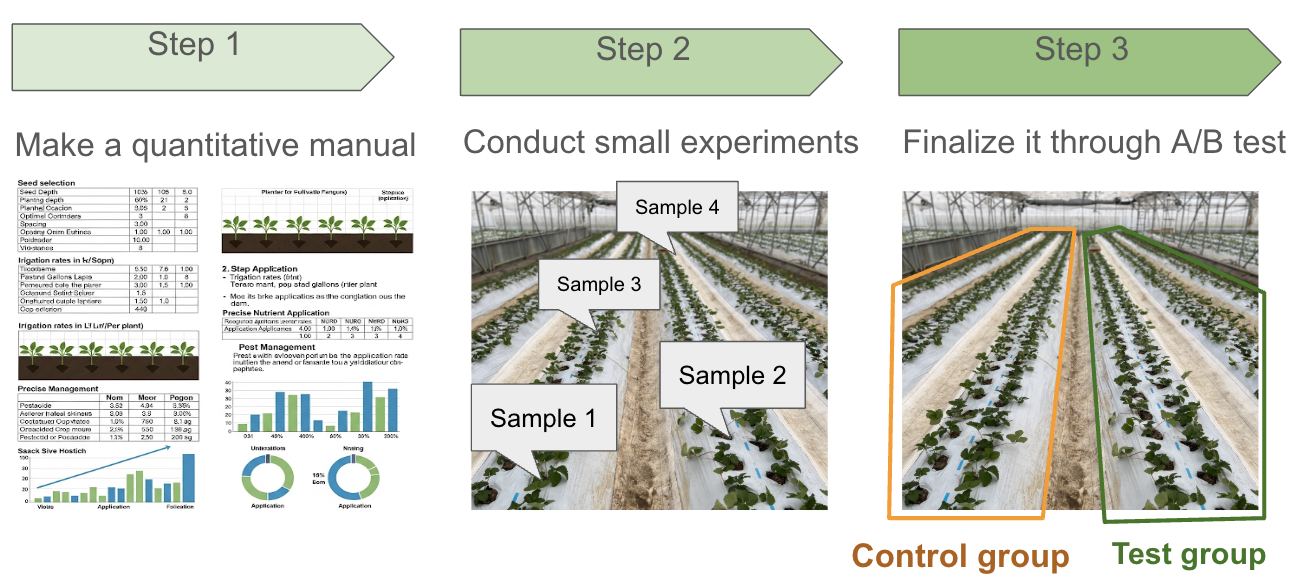
Repeatable Methodology
His success was not by chance. It was the result of a repeatable methodology. He structured a methodology to standardize data collection for building AI models, enabling anyone on the team to collect data efficiently.
Expert Insights Integration
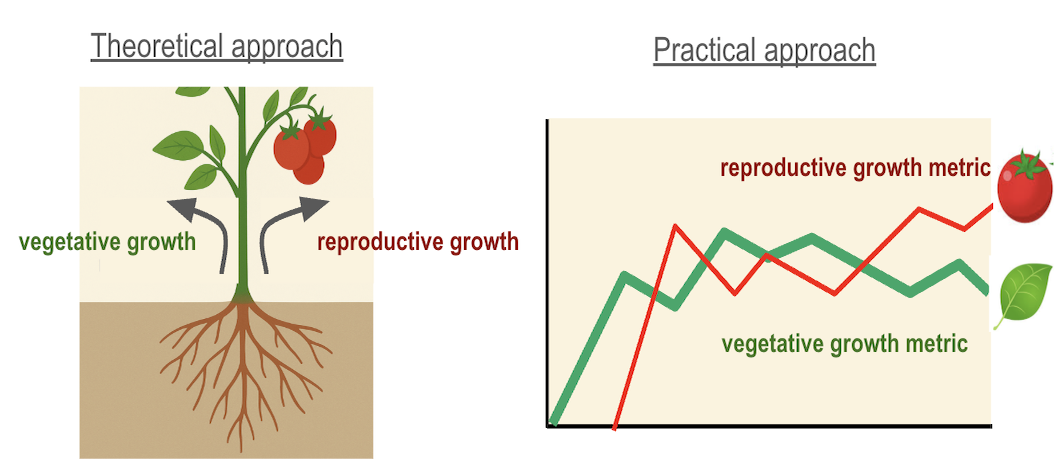
In addition, he leveraged expert insights and translated plant physiology theories into implementable algorithms.
Data-Driven Evaluation
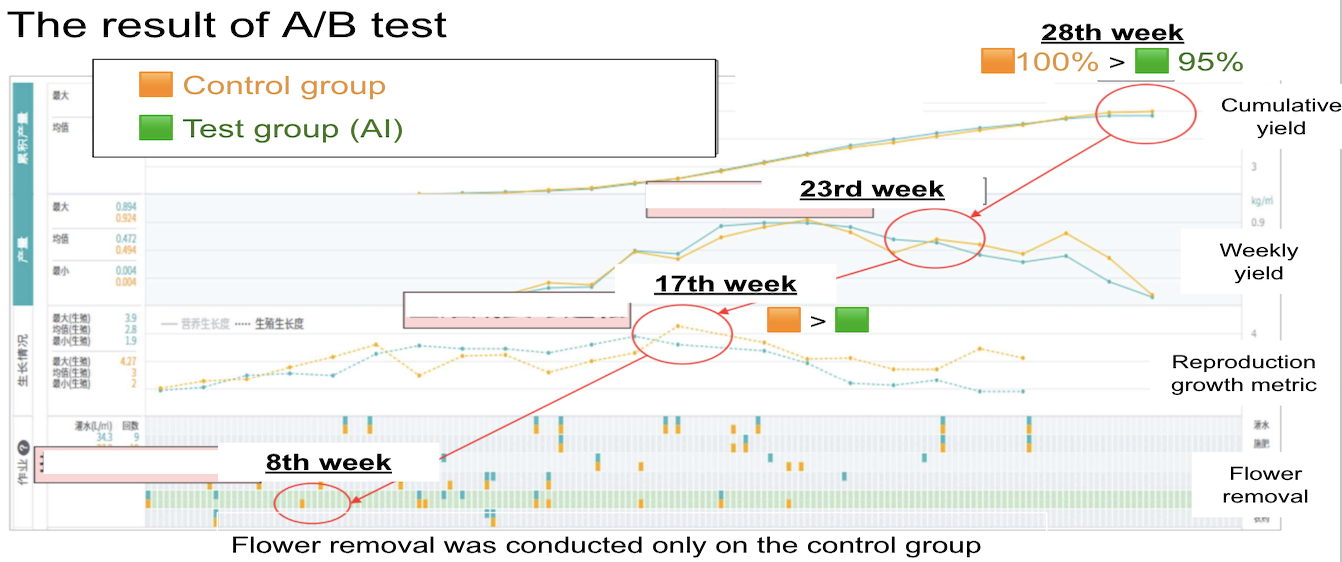
He also visualized outcomes using measurable data, enabling clear evaluation of system performance.
What Brought Me to Canada
"Can you work 24 hours?" This was a famous commercial message for an energy drink when I was growing up. In that kind of environment, I learned many things—not only technical skills, but also ethics, responsibility, and the importance of teamwork. Senior engineers passed down their knowledge through real work, and I was fortunate to be surrounded by inspiring colleagues.
However, over time, the situation began to change. While some people see this as a positive shift toward better work-life balance and individual career paths, others feel that something important is being lost—something that should be passed on to the next generation.
I am proud of what I learned from my seniors. At the same time, I felt frustrated with myself because I wasn't able to pass that knowledge on to the next generation in the way I had hoped.
I began to believe that there must be a place where I could contribute more—where I could share my experience and continue that cycle of learning.
That belief is what led me to Vancouver. I had the opportunity to present my insights on AI automation at Vancouver Linux User Group (VanLUG), and that moment transformed my experience into confidence. To pass on what I learned from my seniors to the next generation—that is why I came to Canada.

To honor what I learned from my seniors, by passing it on to the next generation, and contributing to Canada—
this is my mission.
Patents
A robot control system acquires path, speed, and specification data to analyze motion efficiency. It identifies intervals where adding waypoints can shorten operation time and adjusts the path to reduce inertia. The system then controls joint acceleration to keep loads within target limits, improving overall performance.
A system derives a robot hand's gripping posture for handling a workpiece. It calculates a load index to evaluate whether the posture is appropriate. If the posture is unsuitable, the system iteratively generates and evaluates new postures until an optimal one is found.
An apparatus calculates the peak load on a robot using its motion equation and joint acceleration. It compares this load with a target value during operation. The system adjusts acceleration—reducing it if the load is too high or increasing it if the load is too low—to maintain optimal performance.
A cultivation management device uses environmental data and planned evaluation indices for fruit vegetables and trees. It applies a learning model to determine appropriate tasks, including shape modification work. The system outputs these tasks to support optimal cultivation and management.
A PLC CPU performs motion and sequence control using a CAM table and control program. When a command is received, it updates phase and/or displacement values in the CAM table. The system then executes control using the updated table and outputs the results to the controlled device.
A synchronization control apparatus reduces impact on a driven shaft and ensures smooth start of synchronization. It generates a cam curve and calculates velocity commands based on main shaft position before synchronization. After the start point, it switches to gear-ratio-based control to maintain synchronized motion.